




高光譜圖像處理系統(tǒng)——ENVI遙感軟件系統(tǒng)
發(fā)布時間:2024-03-01
瀏覽次數(shù):350
ENVI,全名為Environment for Visualizing Images,作為遙感領(lǐng)域的一款專業(yè)軟件,以其強(qiáng)大的數(shù)據(jù)處理和圖像分析功能,在全球范圍內(nèi)得到了廣泛的應(yīng)用。本文簡單介紹了ENVI遙感軟件系統(tǒng)在高光譜領(lǐng)域的應(yīng)用。
ENVI,全名為Environment for Visualizing Images,作為遙感領(lǐng)域的一款專業(yè)軟件,以其強(qiáng)大的數(shù)據(jù)處理和圖像分析功能,在全球范圍內(nèi)得到了廣泛的應(yīng)用。本文簡單介紹了ENVI遙感軟件系統(tǒng)在高光譜領(lǐng)域的應(yīng)用。
?

SPEAR Tools全稱是光譜處理與分析?具(Spectral Processing Exploitation and Analysis Resource),在這?ENVI提供了?系列的處理?具,并形成向?qū)б龑?dǎo)使?者按照ENVI的標(biāo)準(zhǔn)處理影像。
SPEAR包含以下10個流程化處理模塊:
異常檢測模塊:搜索光譜不同的背景(譜異常)?標(biāo)
變化檢測模塊:檢測統(tǒng)?地區(qū)不同時段光譜變化的異常
?歌地球橋接器:提供?個簡單的?法將ENVI中的圖像或?量?件輸出到Google Earth中
道路提取模塊:從影像中流程化提取道路信息
?體提取模塊:從影像中流程化提取河流,隱蔽?溝信息
?的相對深度模塊:從?光譜數(shù)據(jù)中快速獲取感興趣?域?的相對深度信息影像植被指數(shù)提取模塊:快捷容易地確定植被的存在情況,并?多光譜圖像可視化該植被的活??平。
船只提取模塊:船只提取模塊,利??和船的對?度。以及船的紋理特征來提取船只信息。
異常檢測模塊(SPEAR Anomaly Detection)
異常檢測提供了?種?法來搜索光譜不同的背景(譜異常)?標(biāo),ENVI使?RXD異常探測算法來檢測光譜信息異于影像背景值的?標(biāo)。
由于植被在?些地區(qū)(?如在?燥的區(qū)域)光譜異常?較明顯,SPEAR 異常檢測模塊提供了能夠抑制植被的操作。
SPEAR異常檢測模塊能夠依靠設(shè)定閾值來減?絕對誤差。
SPEAR異常檢測模塊同時提供了濾波、核查和精度評定?具。
如果得出滿意的結(jié)果,可以將其輸出成shp?件的?量格式。
從影像中提取異常信息操作流程如下:
1. 在ENVI主菜單欄下,選擇Spectral > SPEAR Tools > Anomaly Detection。
彈出?件顯?對話框,選擇輸??件。(輸?的?件必須是能被ENVI
識別的多光譜數(shù)據(jù))設(shè)定保存路徑。
2. 設(shè)定算法模型,包括RXD、UTD、RXD-UTD。
3. 設(shè)定異常檢測參數(shù),設(shè)定Mean Source的來源,指定是否需要抑制植
被。
4. 可以重新設(shè)定參數(shù)來確定異常,最后會彈出兩幅影像,原影像與分析
后結(jié)果,以作?較。
?
變化檢測模塊(SPEAR Change Detection)
變化檢測模塊提供?個?法來檢測影像同?地區(qū)不同時段的變化,并在圖像上凸顯出來,說明是什么要素發(fā)?了什么變化。
變化檢測模塊提供以下?種相對變化檢測?具:
Transform:輸?數(shù)據(jù)堆棧成?個圖像,然后圖像變換(主成分分析,最?噪聲?率,或獨(dú)?成分分析)應(yīng)?于所提取的特征相關(guān)的變化。Subtractive:歸?化差異植被指數(shù)(歸?化植被指數(shù)),紅/藍(lán)?,和?為的?例計(jì)算的輸?數(shù)據(jù)。得出的?率數(shù)據(jù)和波段數(shù)據(jù)從影像數(shù)據(jù)中減去以創(chuàng)建出不同的影像。
Two Color Multi-View (2CMV):來?于時段1的波段顯?在紅?波段通道,來?于時段2的同?波段顯?在綠?波段通道和藍(lán)?波段通道,在?個圖像?區(qū)別于其他影像的亮的部分?青?表?,暗的部分?紅?表?。顏??來表?可能存在變化的區(qū)域。
?
?歌地球橋接器(Googl e Earth Bridge)
它提供了?個簡單的?法將ENVI中的圖像或?量?件輸出到Google Earth 中。Google Earth是?個強(qiáng)?的數(shù)據(jù)可視化?具,它允許圖像被放置在?個區(qū)域或全球范圍內(nèi)。?歌數(shù)據(jù)橋創(chuàng)建了?個包含?量數(shù)據(jù)的kml格式?件。如果選擇縮略圖,kml格式的?量?件也會被輸出。
Google Earth不能直接直接?持包含地理坐標(biāo)的圖像,通過四個?點(diǎn)和?個定義在kml?件上的旋轉(zhuǎn)器將圖像放在地球上。為了確定圖像?件
能夠準(zhǔn)確疊加在上?,?歌地球橋接器將輸?圖像校正到向北的?向。如果可?將會通過包含全球?程數(shù)據(jù)庫的矯正器來進(jìn)?快速的坐標(biāo)校準(zhǔn),如果快速校準(zhǔn)失敗,圖像校正的四個?點(diǎn)會被?來作為控制點(diǎn),把圖像校正?正北?向。
?
影像—地圖校正模塊(SPEAR Image to Map Registration)
影像—地圖校正?具在保留原有的空間分辨率的同時,變換輸?的圖件來匹配基礎(chǔ)圖像的地圖信息。
1. 在ENVI的主菜單中,選擇Spectral > SPEAR Tools > Image-to-Map
Registration,打開?件選擇對話框。
2. 選擇兩幅影像:?幅作為基礎(chǔ)圖件,另?幅是需要校正的圖件。
3. 選擇?于?動連接點(diǎn)匹配的波段,?部分情況下,可見光區(qū)域的紅波
段的是?較合適的。
4. 點(diǎn)擊下?步,會彈出校正參數(shù)對話框,下?步,會彈出?個校正精度
對話框和?個連接點(diǎn)對話框。
5. 點(diǎn)擊Finish,完成處理,對出向?qū)А?/p>
5 獨(dú)?成分分析(Ind ependent Components Analysis)
它可以?來發(fā)現(xiàn)和分離圖像中隱藏的噪聲,可以?來降維、異常檢測、降噪、分類和端元提取以及數(shù)據(jù)融合,不需要任何圖像預(yù)先知識。ICA可以把?組混合信號轉(zhuǎn)化成相互獨(dú)?的成分,在感興趣信號與數(shù)據(jù)中其它信號相對較弱的情況下,這種變換要?主成分分析得到的結(jié)果更加有效。
6 道路提取模塊(Lines of Communication (LOC)- Roads)
?
從影像中流程化提取道路信息。操作流程如下:
1. 輸?影像數(shù)據(jù)
2. 選擇線性信息提取?法,有兩種?法可以選擇
監(jiān)督?法(基于波譜匹配技術(shù))步驟如下:
1)??校正,課選擇六種??校正?法中的任意?種。
2)?戶為繪制道路選擇訓(xùn)練的像素
3)選擇波譜處理?法,繪制道路。有三種?法:SAM、MF and MF/SAM ?率,主成分分析,紅壤指數(shù)。
?監(jiān)督?法
選擇波譜處理?法,繪制道路。有兩種?法,主成分分析,紅壤指數(shù)。紅壤指數(shù)性質(zhì)如同NA VI,計(jì)算出來的結(jié)果紅壤指數(shù)以??顯?。
3. 輸出提取結(jié)果,并可以轉(zhuǎn)化成?量數(shù)據(jù),以shapefile格式輸出。
?
?
?
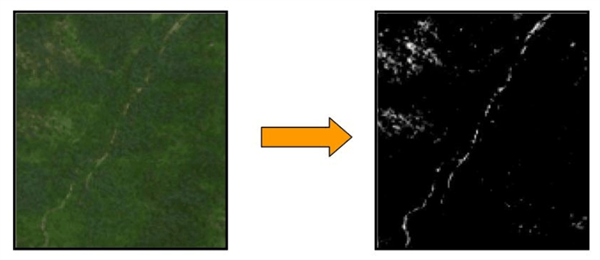
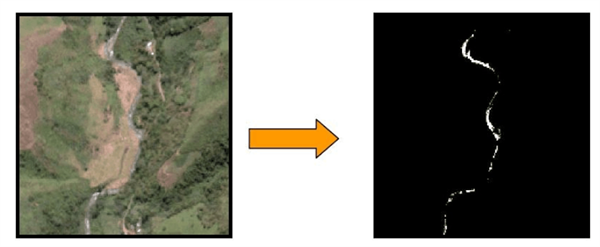
?體提取模塊(Lines of Communication (LOC)- Water)
從影像中流程化提取河流,隱蔽?溝信息。操作流程如下:
1. 輸?影像數(shù)據(jù);
2. 選擇線形信息提取?法,有兩種?法可以選擇
監(jiān)督?法(
基于波譜匹配技術(shù))步驟如下:
1)??校正,可選擇六種??校正?法中的任意?種。
2)?戶為繪制?體選擇訓(xùn)練的像素。
3)選擇波譜處理?法,繪制?體。有三種?法SAM、MF and MF/SAM ?
率,主成分分析,歸?化?指數(shù)(NDWI)。
?監(jiān)督?法
選擇波譜處理?法,繪制?體。有兩種?法:主成分分析,歸?化?指數(shù)(NDWI)。NDWI性質(zhì)如同NA VI,計(jì)算出來的結(jié)果是單波段灰度圖像。
輸出結(jié)果,可以將結(jié)果轉(zhuǎn)?量。
?
?
?
元數(shù)據(jù)瀏覽器(SPEAR Metadata Browser)
元數(shù)據(jù)瀏覽器從國家影像傳輸格式(NITF)圖像中提取的關(guān)鍵元數(shù)據(jù),并??個簡單的閱讀格式來顯?。此外,這個?具提供?個?法來?較多個?來變化檢測的圖像,這種?法還可以在收集影像數(shù)據(jù)時瀏覽傳感器和太陽的三維圖形。
正射校正(SPEAR Orthorectification)
?個正射校正過的影像包含了對應(yīng)地?的真實(shí)?何、地形信息。達(dá)到?定精度的傳感器的傳感器導(dǎo)致的畸變已經(jīng)被去除。
正射校正變換把航空照?或衛(wèi)星獲得的圖像轉(zhuǎn)換為中?投影?地?的正交視圖,從?消除了因傳感器傾斜和地形起伏所帶來的誤差。整幅影像上?例尺是連續(xù)的,并忽略了?低起伏,因此能夠提供?向和距離上的精確的測量數(shù)據(jù)。地理空間專業(yè)從業(yè)?員可以很?便的將正射校正數(shù)據(jù)和其他的地理信息空間數(shù)據(jù)?起應(yīng)?在城市規(guī)劃、資源管理和其他相關(guān)領(lǐng)域。
泛銳化圖像融合?法(SPEAR Pan Sharpening)
泛銳化圖像融合?法是??分辨率的全?數(shù)據(jù)與較低分辨率的多光譜數(shù)據(jù)融合創(chuàng)建?個彩??分辨率的數(shù)據(jù)集。得出的結(jié)果只能做表?上的輔助分析?不能做深?的頻譜分析。
?
地形分類?具(TERCAT)
在地形分類(TERCAT)?具創(chuàng)建的?個輸出結(jié)果中,具有相似光譜特性的像素被分成類。這些類可以是?戶??定義的或是系統(tǒng)?動?成。TERCAT?具提供所有的標(biāo)準(zhǔn)ENVI的分類算法,加?個額外的算法稱為“贏家通吃”。
?
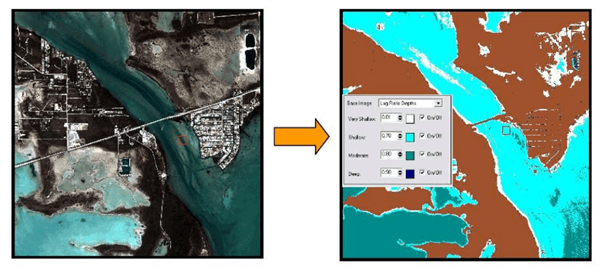
?的相對深度模塊(Relative Water Depth)
從?光譜數(shù)據(jù)中快速獲取感興趣?域的?的相對深度信息影像。操作流程如下:
1. 輸??光譜影像;
2. ??校正,提供五種可供選擇的?法(模糊減少,平均域,對數(shù)殘差,
IARR反射率,經(jīng)驗(yàn)線性)。如果沒有特殊要求,在本流程中建議不執(zhí)?
該步驟,因?yàn)樵?域的??校正過程中,常常引起計(jì)算出來的相對?深
數(shù)據(jù)效果不太令?滿意,甚?異常。
3. 選擇計(jì)算?的相對深度的?法,有兩種?法供選擇:對數(shù)?例轉(zhuǎn)換和主
成分分析。
4. 輸出與?深度相關(guān)數(shù)據(jù),并把結(jié)果加載到可?波段列表中。
?
?
?
波譜相似地物提取(Spectral Analogues)
波譜相似地物提取模塊
從輸?影像中提取與已知波譜信息地物類似的地物。操作流程如下:
1. ?輸?多光譜數(shù)據(jù);
2. ?輻射校正,提供五種可供選擇的?法(模糊減少,平均域,對數(shù)殘差,IARR 反射率,經(jīng)驗(yàn)線性);
3. ?選擇?戶感興趣區(qū)域ROI ;
4. ?選擇波譜處理?法,包括:MF、SAM 、MF/SAM 、歸?化歐?距離。
5. ?輸出突出了波譜相似地物的影像,并加載到可?波段列表中。
?
?
?
植被提取模塊(SPEAR Vegetation Delineation)
快捷容易地確定植被的存在情況,并?多光譜圖像可視化該植被的活??平。植被指數(shù)NDVI提取模塊操作流程如下:
1. ?輸??件;
2. ?輻射校正,提供五種可供選擇的?法(模糊減少,平均域,對數(shù)殘差,IARR 反射率,經(jīng)驗(yàn)線性);也可以跳過這?步;
3. ?計(jì)算植被指數(shù);
4. ?對植被指數(shù)結(jié)果數(shù)據(jù)利?顏?表附上顏?,也可以應(yīng)?密度分割的?法對植被指數(shù)結(jié)果數(shù)據(jù)進(jìn)?密度分割,保存結(jié)果。
?
去除豎條紋(Vertical Stripe Removal)
在圖像的同質(zhì)區(qū)域可能會出現(xiàn)?為導(dǎo)致的垂直條帶,這?區(qū)域的亮度與附近的亮度是不?樣的。這些?為地物使圖像很難識別,它們會為圖像的處理產(chǎn)?消極的影像。
當(dāng)圖像的背景是相對均勻(整個圖像有?致的亮度?平)時,豎條紋刪除?具去除?具?較好?。由于它可以產(chǎn)??為異常條帶,所以在異構(gòu)圖像上(如含有明亮的?地和暗??域的沿海圖像),不推薦使?此?具。
?
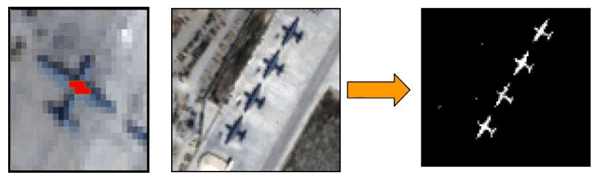
船只提取模塊(Watercraft Find er)
船只提取模塊,利??和船的對?度以及船的紋理特征來提取船只信息。操作流程如下:
1. 輸?待處理?件;
2. 選擇船只探測的處理?法,有兩種?法供選擇:
texture based search 基于紋理的提取,該?法允許?戶?先創(chuàng)建?個陸地和?的掩膜,然后?主成份分析的?法增強(qiáng)?和船的對?度,最后利?紋理特征提取船。
Two band scatterplot允許?戶增強(qiáng)?維散點(diǎn)圖中典型地物所在的像素,從?增強(qiáng)船與?的對?度。
3. 選擇紋理提取的?法,有pca和skip pca兩種?法,如果影像的近紅外
波段?和船的對?度很?,選?skip pca跳過這?步,如果不夠明顯,
選?pca來增強(qiáng)對?度;
4. 選擇進(jìn)?紋理特征提取的波段,(盡量選擇?和船對?度最?的波段),
?成紋理提取后影像,可以利?直?圖交互式拉伸修改提取的效果,給定紋理濾波的域值,進(jìn)?紋理濾波;
5. 去除salt and pepper以及陸地等?船信息;
6. ?成船只提取結(jié)果影像;
7. 將結(jié)果影像轉(zhuǎn)?量并?動疊加到原始影象上。
?

相關(guān)產(chǎn)品
-
紅外光譜的發(fā)展、原理、特點(diǎn)、分類
紅外光譜的發(fā)展、原理、特點(diǎn)、分類紅外光譜的技術(shù)在各領(lǐng)域中的應(yīng)用相繼經(jīng)歷了很長時期,逐漸完善著自身技術(shù)在領(lǐng)域中的應(yīng)用,且將低成本高性能作為發(fā)展與創(chuàng)新的主要方向。本..
-
近紅外光譜技術(shù)的優(yōu)缺點(diǎn)和應(yīng)用范圍
?由于近紅外光譜在光纖中良好的傳輸性,近年來也被很多發(fā)達(dá)國家廣泛應(yīng)用在產(chǎn)業(yè)在線分析中。近紅外定量分析因其快速、正確已被列人世界谷物化學(xué)科技標(biāo)準(zhǔn)協(xié)會和美國谷物化學(xué)..
-

高光譜數(shù)據(jù)常見預(yù)處理方法有哪些?
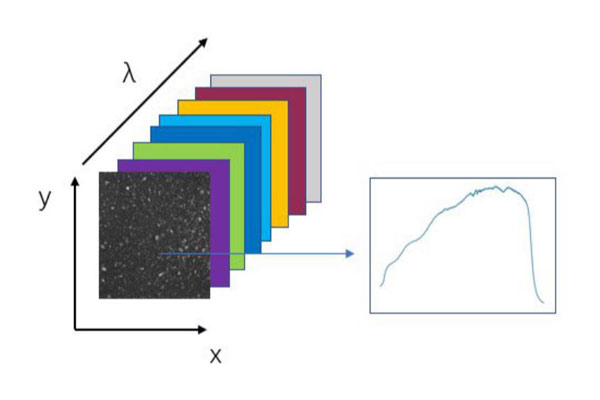
高光譜在采集數(shù)據(jù)時會有成百上千個不同的波段數(shù)據(jù),數(shù)據(jù)量巨大從而增加了數(shù)據(jù)處理的難度。而且在高光譜圖像采集過程中會有來自儀器與環(huán)境的干擾,獲得的光譜信號易存在噪聲..
-

高光譜成像儀光譜數(shù)據(jù)特征波長的選取方法介紹
高光譜成像儀?在對樣品進(jìn)行側(cè)臉時,會采集多波段的光譜數(shù)據(jù),全波段數(shù)據(jù)有較多的冗余信息,因此就需要采用一定的方法來選取樣本光譜的特征波段與紋理特征的重要變量。本文..










