




基于無人機高光譜遙感在智慧城市建設(shè)中的研究與應(yīng)用
發(fā)布時間:2023-04-25
瀏覽次數(shù):531
?高光譜遙感已成為獲取更精細信息、為“智慧城市”定量分析和精細化管理提供豐富、準確、合理數(shù)據(jù)的重要技術(shù)手段。
高光譜遙感已成為獲取更精細信息、為“智慧城市”定量分析和精細化管理提供豐富、準確、合理數(shù)據(jù)的重要技術(shù)手段。為了更好地理解和利用高光譜數(shù)據(jù)助力數(shù)字城市建設(shè),本文介紹了高光譜遙感影像的特征和特征研究。那么如何通過無人機采集城市地物的高光譜信息呢?(無人機)和高光譜成像儀進行了描述,大大提高了城市數(shù)據(jù)采集的效率。最后,詳細分析討論了基于無人機的高光譜遙感和城市地物深度信息挖掘的各種應(yīng)用案例,如地形分類、城市綠化分析等。研究結(jié)果表明,機載高光譜影像(HIS)具有與彩色攝影和多光譜遙感相比的獨特優(yōu)勢,具有更豐富和更高水平的光譜細節(jié)和物理和化學性質(zhì)。
基于無人機的高光譜遙感智慧城市建設(shè)地形分類城市綠化分析
1、介紹
智慧城市是利用大數(shù)據(jù)、云計算、物聯(lián)網(wǎng)(IoT)、遙感(RS)等技術(shù),對城市進行多分辨率、多尺度、多時空、多類型的三維描述。) 和人工智能 (AI) [1]。城市信息可以建立在地理坐標系上,方便每個人通過互聯(lián)網(wǎng)了解城市的過去、現(xiàn)在和未來[2]。眾所周知,測繪、遙感和地理信息技術(shù)在智慧城市建設(shè)中發(fā)揮著越來越重要的作用[3]。基于無人機的遙感技術(shù)作為城市多維信息采集的重要手段具有成本低、效率高、操作靈活、覆蓋面廣等優(yōu)點,被廣泛應(yīng)用于智慧城市建設(shè)的應(yīng)急管理、城市規(guī)劃、旅游管理、環(huán)境監(jiān)測等諸多領(lǐng)域。
2、問題
智慧城市的發(fā)展與建筑物、植被、水體、交通、人口分布、環(huán)境、空氣質(zhì)量等方面的信息密切相關(guān)[6],因此,如何準確獲取和高效監(jiān)測城市信息,實現(xiàn)城市可持續(xù)發(fā)展發(fā)展是智慧城市建設(shè)的重要挑戰(zhàn)[7]。
傳統(tǒng)無人機搭載的航拍光學遙感影像僅由紅、綠、藍波段的光信息組成,無法通過人工目視解譯監(jiān)測建筑物識別,效率低且精度有限[ 8 , 9 ]。UAV-LiDAR(Laser Radar)可以解決傳統(tǒng)航空攝影測量無法完成的任務(wù),如夜間數(shù)據(jù)采集、植被提取、DEM(Digital Elevation Model)提取、精細結(jié)構(gòu)建模等。但LiDAR的主要問題成本高、重量大、操作復雜、數(shù)據(jù)利用率低[10]。
光譜分析作為自然科學分析的重要手段,常被用來檢測物體的物理結(jié)構(gòu)、化學成分等指標。圖像光譜測量將光譜技術(shù)與成像技術(shù)、光譜分辨率與圖形分辨率相結(jié)合,創(chuàng)造了表面光譜分析的空間維度,即現(xiàn)在的多光譜成像和高光譜成像技術(shù)[11]。可以識別地物的形狀和結(jié)構(gòu),也可以根據(jù)光譜特征的差異提取各種物體的分類。多光譜圖像的主要問題是光譜分辨率低,波段寬,導致多光譜數(shù)據(jù) 對物體的信息表達有限[12]。
3、高光譜遙感
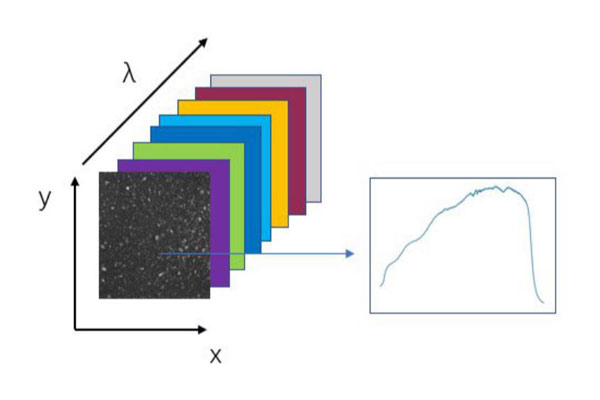
高光譜遙感是獲取更多智慧城市精細化信息的重要技術(shù)。對城市綠化程度和質(zhì)量、城市工程巖土特征、水污染分析等進行分析統(tǒng)計是必不可少的。高光譜圖像是光譜范圍為10 -2 λ,光譜分辨率小于10 nm的光譜數(shù)據(jù)。一張高光譜圖像由 n 個像素組成,每個像素由 M 維光譜向量組成。高光譜圖像包含從可見光到紅外的數(shù)十到數(shù)百個連續(xù)和分段波段的物體信息光譜區(qū)域。成像光譜儀獲取高光譜數(shù)據(jù),為每個像素提供300-400個窄帶光譜信息,生成完整連續(xù)的光譜曲線(見圖1)。
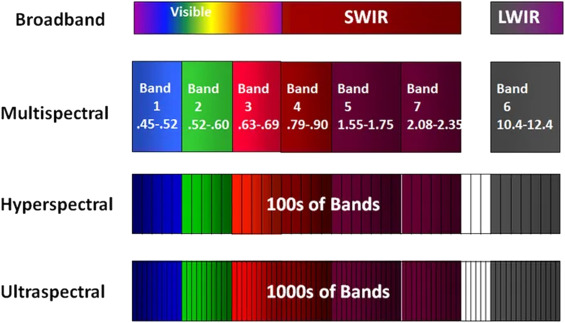
圖1多光譜和高光譜數(shù)據(jù)之間的差異
高光譜數(shù)據(jù)反映了高分辨率光學信息的特征。高光譜傳感器利用許多窄電磁波波段獲取地面物體的相關(guān)信息。由于高光譜圖像具有較高的光譜分辨率,因此高光譜圖像可以提供更多的地物細節(jié)信息,有利于地物物理化學性質(zhì)的反演。可以為不同的設(shè)施提取它們獨有的波段特征,使得原本在寬帶遙感中無法檢測到的物質(zhì)可以在高光譜數(shù)據(jù)中檢測到[15]。
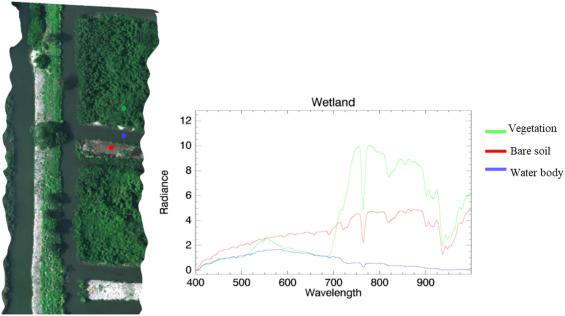
高光譜傳感器包括航天高光譜傳感器、機載高光譜傳感器和地面高光譜成像儀等,搭載在衛(wèi)星、飛機、地面操縱儀器等不同高度的遙感平臺上[16]。與星載高光譜遙感相比,機載高光譜遙感具有更高的探測精度。高光譜圖像采樣間隔小,分辨率小于3 nm。精細的光譜分辨率反映了地物光譜的細微特征。不同地物的高光譜分布如圖2所示。
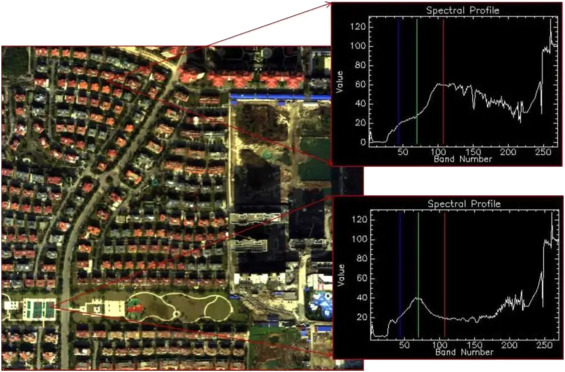
圖2不同地面物體的光譜輪廓
4、無人機高光譜圖像數(shù)據(jù)采集
無人機是目前城市高光譜遙感圖像數(shù)據(jù)采集的載體。在數(shù)據(jù)采集過程中,地面操作人員應(yīng)注意通過無人機飛控系統(tǒng)科學規(guī)劃飛行參數(shù)和飛行路線,地面參數(shù)也應(yīng)謹慎設(shè)置[17]。當無人機到達預定位置后,地面控制中心向無人機飛控系統(tǒng)發(fā)送采集指令,可有效保證圖像重疊率,提高采集效率,獲得高質(zhì)量圖像。
高光譜遙感圖像獲取過程主要分為以下四個步驟:
(1)第一步確定無人機平臺的飛行參數(shù),包括無人機平臺的飛行高度、飛行速度、圖像重疊率等。需要注意的是,這些參數(shù)是相互獨立的,在確定參數(shù)時又相互影響。因此,需要結(jié)合任務(wù)的實際要求和設(shè)備的性能綜合考慮。在實際應(yīng)用中,首先需要確定重疊率以保證圖像精度,然后根據(jù)分辨率確定飛行高度,最后根據(jù)相機頻率確定速度。
(2) 第二步,規(guī)劃飛行路線。通過無人機飛控軟件可以提前規(guī)劃飛行路線。曲折的飛行路線通常被設(shè)計成可以更全面地拍攝城市地區(qū)而沒有角落問題。
(3) 第三步確定相機參數(shù),主要是確定相機的焦距、曝光時間等。焦距決定了圖像采集的清晰度。不建議采用自動對焦模式,因為它會導致高光譜成像模糊。成像儀曝光時間的控制是決定拍攝質(zhì)量的關(guān)鍵。如果成像儀的曝光時間過長,將會丟失一些遙感信息。但如果曝光時間過短,圖像的信噪比會降低。另外,采集過程對環(huán)境的照度也有一定的要求。一般來說,高光譜遙感圖像應(yīng)該在兩個小時內(nèi)采集,也就是中午左右。
(4) 最后一步是通過無人機攜帶的高光譜成像采集數(shù)據(jù)。地面控制器將成像儀鏡頭調(diào)整到垂直向下的位置,無人機飛行過程中即可自動進行圖像采集。無人機高光譜遙感飛行圖如圖3所示。
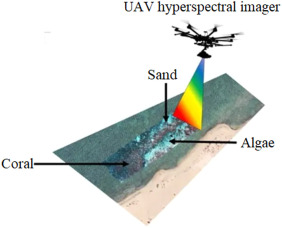
圖3無人機高光譜遙感飛行示意圖
5、地形分類
不同的地形有不同的高光譜曲線,因此可以根據(jù)不同的光譜反射率值快速對智慧城市的地形進行分類,如圖4所示,分別為植被、水體、道路、建筑物、車輛的高光譜反射率曲線。
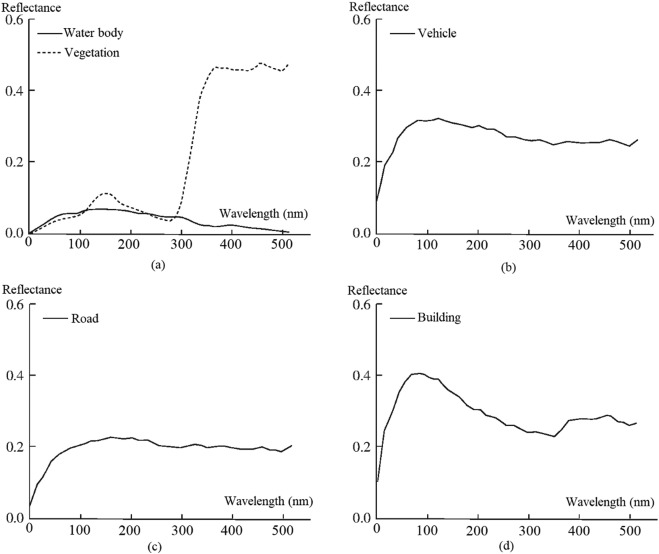
圖4不同地形在不同波段的光譜反射率
從圖4 (a)可以看出,植被反射率變化的陡坡位于第126~164波段,根據(jù)公式( 1),然后可以利用NDVI(差異植被指數(shù))值來分離植被。
水體光譜曲線整體偏低,變化較為平緩。在第226波段的近紅外波段(中心波長為900.12nm),水體的輻射值很低(平均值小于0.005)。因此,可作為水體的分離條件,判斷第226條帶是否小于0.02。
通過觀察光譜特性曲線,建筑物的光譜曲線在第25波段處于峰值位置,建筑物的反射率在第77波段下降最快。因此,利用兩個波段反射率的差異來區(qū)分建筑物。
由于建筑物和植被的雙重陰影,道路和水體的反射率很低,難以區(qū)分。但與道路相比,水體的整體反射率很低,因此當水體處于同一波段區(qū)域時,其反射值變化緩慢。在137和162 nm波段之間,水體有一個相對反射率迅速下降的斜坡,這正是道路所沒有的特征。因此,可以利用光譜變量特性對水體進行分離。水體在137~162 nm波段的反射率曲線處于上升階段,因此可以通過式(2)分離出部分屬于水體的道路。
對地形進行特征分類的目的是更好地觀察城市地物,如植被、建筑物、土壤、道路、水體、樹木等[18] 。分類方法通常采用監(jiān)督分類和SVM(支持向量機)進行監(jiān)督學習。端元檢測主要用于提取圖像中的單個物體,如道路或建筑物。首先通過ENVI軟件提取道路或建筑物的光譜數(shù)據(jù)作為端元檢測的輸入數(shù)據(jù)。然后應(yīng)用光譜角度檢測方法識別高光譜圖像中的研究對象. 原始檢測結(jié)果存在一些噪聲和散點,需要優(yōu)化。分類后處理工具,包括最大值分析和聚類,用于去除小斑塊噪聲。優(yōu)化結(jié)果如圖 6 所示。5和6。
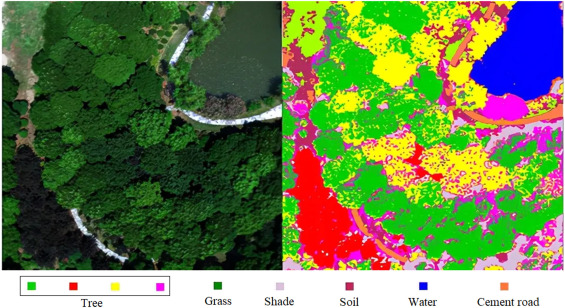
圖5基于高光譜數(shù)據(jù)的景觀分類結(jié)果
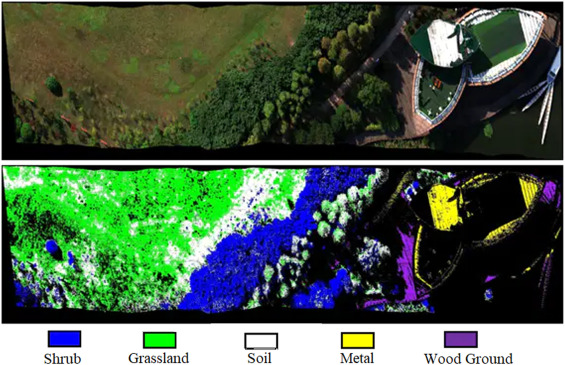
圖6基于高光譜數(shù)據(jù)的 Pecies 分類結(jié)果
6、城市綠化分析
城市綠化是城市可持續(xù)發(fā)展的重要內(nèi)容之一。傳統(tǒng)的測量分析方法難以對城市綠化環(huán)境進行快速分析。通過無人機的高光譜手段,城市管理者可以提取城市綠地,進一步分析植被的健康水平、病蟲害、含水量或易燃風險[19]。以常用的三個綠化指標為例,對城市綠化率進行定量分析。
(1) 紅色歸一化植被指數(shù)(ReNDVI)
該指標是傳統(tǒng)NDVI的改進,更適用于不同密度條件下的植被健康檢測。應(yīng)用包括精準農(nóng)業(yè)、森林監(jiān)測和植被壓力檢測。綠色植被 ReNDVI 的常見范圍是 0.2 到 0.9。主要用于測量植被健康狀況。ReNDVI 值越高,植被越健康。RENDVI的計算公式如式(3)。
分別表示對應(yīng)于 750 nm和 705 nm波長的反射率 。分析結(jié)果示意圖如圖7所示。

圖7植被生長分析結(jié)果
(2)結(jié)構(gòu)不敏感色素指數(shù)(SIPI)
SIPI指數(shù)最大限度地提高了對大量類胡蘿卜素與葉綠素比例的敏感性,同時降低了對冠層結(jié)構(gòu)變化的敏感性。應(yīng)用包括植被健康監(jiān)測和植物生理脅迫檢測。綠色植被SIPI的常見范圍是0.8~1.8。該指數(shù)主要用于衡量植被脅迫。SIPI值越高,植被生長壓力越大。SIPI的計算公式如式(4)。
分別代表波長445nm、680nm、705nm對應(yīng) 的反射 率值 。分析結(jié)果示意圖如圖8所示。
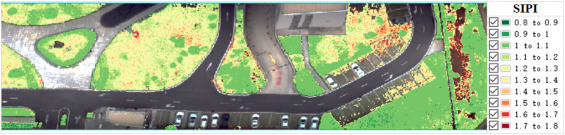
圖8植被生長脅迫分析結(jié)果
(3)水帶指數(shù)(WBI)
含水量是植被的一個重要參數(shù)。冠層含水量指數(shù)衡量的是葉冠中的含水量。較高的含水量表明植被更健康,可能生長得更快或火災(zāi)風險更低。隨著冠層含水量的增加,葉片在970 nm處的光吸收強度 較900 nm處逐漸增強。應(yīng)用包括樹冠壓力分析、火災(zāi)風險分析和農(nóng)業(yè)管理。綠色植被的 WBI 的常見范圍是 0.8 到 1.2。該值越高,植被含水量越低。SIPI的計算公式如式(5)。
分別代表970 nm和900 nm波長對應(yīng)的反射率值 。分析結(jié)果示意圖如圖9所示。
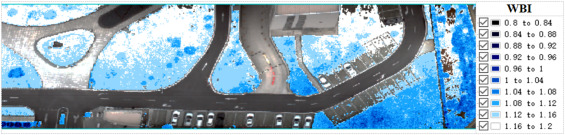
圖9植被冠層含水量分析結(jié)果
7、城市水環(huán)境分析
隨著經(jīng)濟的快速發(fā)展和人類活動的加強,河流、湖泊的水污染問題日益嚴重。傳統(tǒng)的水環(huán)境調(diào)查采用人工野外采樣和實驗室采樣分析,效率低下,研究范圍有限。因此,有必要通過高光譜成像技術(shù)手段進行綜合研究,保護水環(huán)境[20]。
基于水體高光譜圖像數(shù)據(jù)的反演模型很容易識別城市水體污染。研究了城市內(nèi)河水體的濁度和葉綠素濃度。濁度可以反映水體污染情況,葉綠素濃度可以反映水體富營養(yǎng)化程度。分析結(jié)果如圖10(a)和10(b)所示。
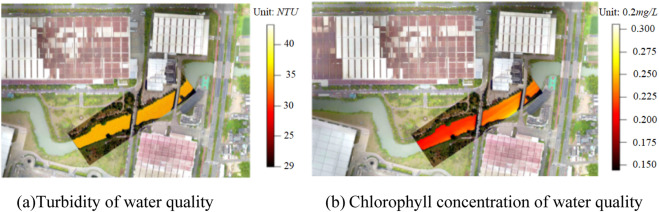
圖10河流水質(zhì)濁度和葉綠素濃度分析結(jié)果
8、巖性鑒別
巖土特性是城市工程建設(shè)的基礎(chǔ)。根據(jù)電磁波理論,任何物質(zhì)光譜的產(chǎn)生都有嚴格的物理機制[21]。巖石和礦物的光譜特征主要是由于組成物質(zhì)中離子和基團的晶場效應(yīng)以及基團的振動。由于各種礦物的晶體結(jié)構(gòu)不同,晶格振動產(chǎn)生的各種礦物的光譜特征也不同,如圖11所示。
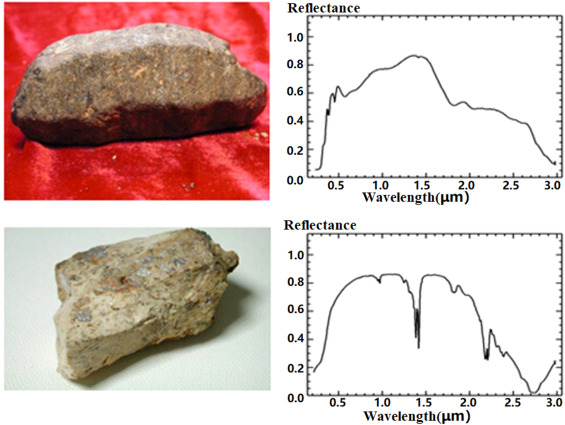
圖11不同巖石的高光譜特征
礦物晶格中鐵等過渡金屬元素的存在決定了0.4~1.3 μm范圍內(nèi)的光譜特性 。1.3~2.5 μm光譜范圍內(nèi)的光譜特征 由礦物成分中的碳酸鹽、羥基和可能存在的水分子決定。3~5 μm紅外波段的光譜特性 由Si-O、Al-O等分子鍵的振動模式?jīng)Q定。電子因不同能級之間的躍遷而吸收或發(fā)射特定波長的電磁輻射,從而形成特定波長的光譜特性[22] . 因此,不同晶格結(jié)構(gòu)的巖石的礦物成分具有不同的光譜特征。
高光譜遙感影像可以檢測到巖石和土壤的精細光譜,從而可以根據(jù)高光譜遙感檢測到以前在寬帶中無法檢測到的光譜特征。不同類型的巖石可以通過各種巖石和土壤的高光譜反射率特征來識別,如圖12所示。
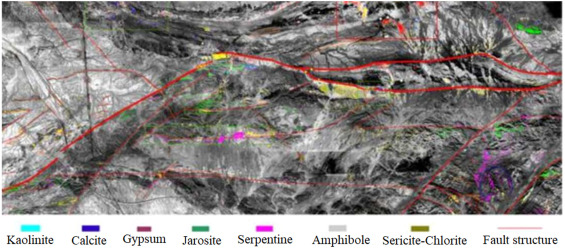
圖12基于高光譜遙感影像的巖性分類
9、工程應(yīng)用
圖 13為城市紅樹林濕地公園的高光譜信息,重點觀察植被、裸土和水體。無人機飛行高度為200 米,飛行速度為4.5 米/秒,曝光時間為10 毫秒。從圖13可以看出植被在綠光區(qū)有明顯的反射峰,在紅光區(qū)有明顯的吸收谷。反射率在可見光波段和近紅外波段(約0.73μm)之間急劇上升,形成“紅邊”現(xiàn)象。“綠峰”、“紅谷”、“紅邊”是綠植曲線最明顯的三個特征。土壤的光譜反射率值在可見光區(qū)和近紅外區(qū)上升緩慢,其光譜反射率曲線與農(nóng)作物有較大差異。水體的光譜反射率值在各個波段都比較平緩。
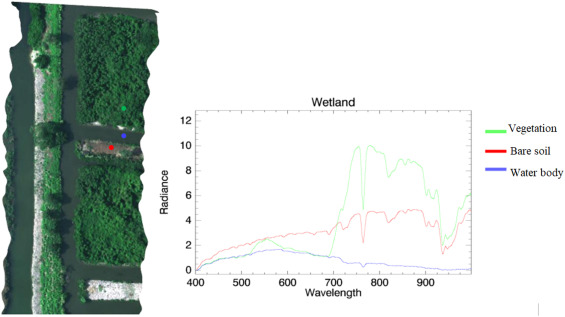
圖13工程應(yīng)用案例一結(jié)果
圖 14為納米高光譜成像儀搭載無人機采集的貴陽百花湖入海口河道高光譜數(shù)據(jù)。飛行高度為150 米,飛行速度為3 米/秒,曝光時間為10 毫秒。百花湖入水口植被、裸土和水體的高光譜結(jié)果如圖14所示。從圖14可以看出,該區(qū)域土壤和水的高光譜反射率正常。相比之下,植被的高光譜反射率峰值集中在800 nm附近。
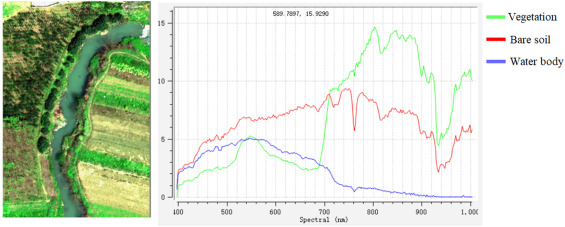
圖14工程應(yīng)用案例二的結(jié)果
下圖顯示了無人機成像儀采集的某大學校園草坪的高光譜數(shù)據(jù)。飛行高度為150 米,飛行速度為3 米/秒,曝光時間為5 毫秒。從下圖可以看出,該區(qū)域植被、土壤、水體的高光譜反射率正常。
10、結(jié)論
高光譜遙感利用較窄的電磁波段獲取物體的相關(guān)信息,包括豐富的空間信息、輻射信息和光譜信息。與寬帶遙感數(shù)據(jù)相比,高光譜遙感數(shù)據(jù)具有光譜分辨率高、光譜細節(jié)更豐富、層次更高、信息無損、實時性強等優(yōu)點,可以方便快捷地獲取整體觀測數(shù)據(jù)。某個地區(qū)的。無人機為城市高光譜遙感影像的數(shù)據(jù)采集提供了一種低成本、高效、靈活的載體。計算機軟件對采集到的圖像信息進行處理,將高光譜數(shù)據(jù)的數(shù)字值轉(zhuǎn)換為反射率數(shù)據(jù)(紅外線、近紅外線和可見光)。連續(xù)光譜信息可以通過降噪獲得地面及其附著物的信息。應(yīng)用高光譜遙感的完整光譜曲線描述地物的光譜特征,識別各種地物的診斷光譜,可為當前建設(shè)的建筑物分類、土地利用變化檢測和目標識別提供關(guān)鍵信息和智慧城市的發(fā)展。
上一頁 : 高光譜成像在回收行業(yè)應(yīng)用
下一頁 : 高光譜相機在文物顏料鑒定中的應(yīng)用

相關(guān)產(chǎn)品
-
紅外光譜的發(fā)展、原理、特點、分類
紅外光譜的發(fā)展、原理、特點、分類紅外光譜的技術(shù)在各領(lǐng)域中的應(yīng)用相繼經(jīng)歷了很長時期,逐漸完善著自身技術(shù)在領(lǐng)域中的應(yīng)用,且將低成本高性能作為發(fā)展與創(chuàng)新的主要方向。本..
-
近紅外光譜技術(shù)的優(yōu)缺點和應(yīng)用范圍
?由于近紅外光譜在光纖中良好的傳輸性,近年來也被很多發(fā)達國家廣泛應(yīng)用在產(chǎn)業(yè)在線分析中。近紅外定量分析因其快速、正確已被列人世界谷物化學科技標準協(xié)會和美國谷物化學..
-

高光譜數(shù)據(jù)常見預處理方法有哪些?
高光譜在采集數(shù)據(jù)時會有成百上千個不同的波段數(shù)據(jù),數(shù)據(jù)量巨大從而增加了數(shù)據(jù)處理的難度。而且在高光譜圖像采集過程中會有來自儀器與環(huán)境的干擾,獲得的光譜信號易存在噪聲..
-

高光譜成像儀光譜數(shù)據(jù)特征波長的選取方法介紹
高光譜成像儀?在對樣品進行側(cè)臉時,會采集多波段的光譜數(shù)據(jù),全波段數(shù)據(jù)有較多的冗余信息,因此就需要采用一定的方法來選取樣本光譜的特征波段與紋理特征的重要變量。本文..










